Case Detail
Scanning Rangefinder
Environmental recognition of service robots, 3D
Environmental recognition of service robots, 3D
Obstacle avoidance and autonomous mobility of service robots by recognizing the surrounding environment.
Case Study
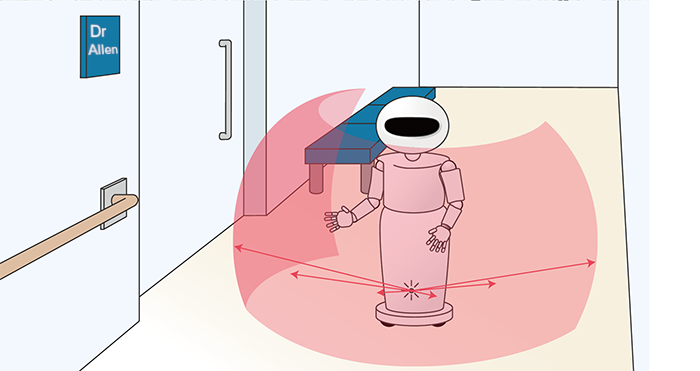
The area around the service robot is measured and mapped using point cloud data to identify its own position.
By measuring in three dimensions (3D), it became easier to detect protrusions and steps.
By measuring in three dimensions (3D), it became easier to detect protrusions and steps.
Product's Category
- Scanning Rangefinder
- Photoelectric Switch
- Sensor for Iron & Steel Industry
- Optical Data Transmission Device
