
YLM-10LX
3D LiDAR
Fully solid-state mechanical-less drive
Distance: 0.3 to 10m (reflectance 10%), Field of View: Max.110°(H) x 80°(V)
Parameters of the field of view and resolution can be dynamically changed depending on the software settings.
Ideal for applications such as AMR, forklifts, and robots.
ROS compatible.
Overview
Solid state beam steering LCM
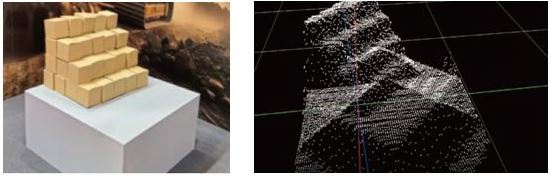
Digital scanning of line light laser VCSEL Laser with liquid crystal deflection (LCM) without using any mechanical parts.
Using LCM, horizontal line light is scanned vertically and received line by line, which reduces multipath interference and stabilizes distance measurement compared to TOF cameras.
It provides new value that could not be realized with conventional mechanical scanning technology.
*LCM is a unique technology patented by Lumotive.
https://lumotive.com/technology/
Characteristics of solid state scanning using LCM
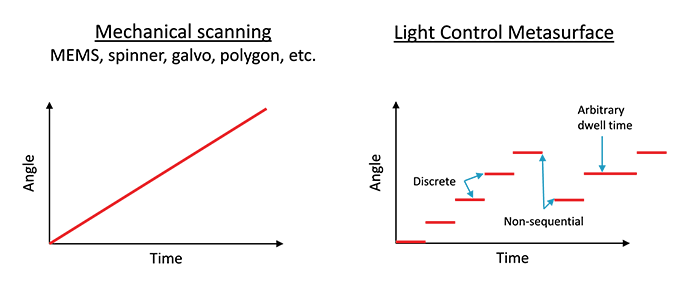
On the other hand, in solid-state scanning using LCM, the detection range changes depending on the software settings. The detection range (viewing angle) and resolution can be dynamically scanned, and the resolution, detection range, and frame rate can be flexibly and randomly scanned as well.
Multiple fields of view (FoV) can be set
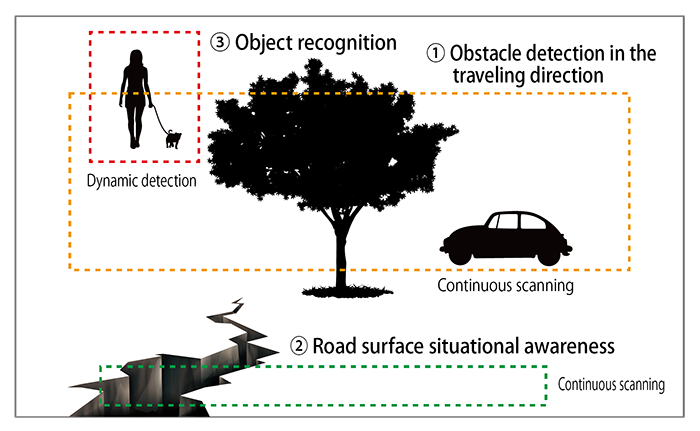
It is also possible to scan only specific place or object at the same time.
Application

Model
*Sensor unit
| Model Number | Code Number | |
| YLM-10LX | UYLM001 | |
*Power cable with connector (Option)
| Model Number | Code Number | Length |
| YLM-C003 | UZ00169 | 3m |
*Ethernet connector (Option)
| Model Number | Code Number | Length |
| YLM-ENET002 | UZ00170 | 2m |
Specification
| Product name | 3D LiDAR |
| Model No. | YLM-10LX |
| Supply voltage | 15 to 30VDC |
| Current consumption | 25W or less, 24VDC:1A |
| Detection range*†※1 | 0.3m ~ 10m (for reflectance 10%) |
| 1m~15m(for reflectance 90%) | |
| Field of view (FOV) | 110°(H)×80°(V) The vertical FOV is a guaranteed value, settings can be configured up to 90° |
| The vertical FOV can be dynamically changed by software | |
| Distance accuracy*†※2 | 0.3m ~ 2m : < ±80mm, 2m ~ : < ±2.0% |
| Repeatability*†※2 | σ< 1.5% |
| Resolution | QVGA:320×240 VGA:640×480 |
| Framerate*† | 2 ~ 60Hz (changes depending on vertical FOV and other parameters) |
| Ex. QVGA, vertical FOV 90°(full frame) : 9.25Hz (default) | |
| Discrete line scanning speed*† | 840 lines/sec |
| Point cloud data per sec | Approx. 500,000 points/sec (default: QVGA, vertical FOV 90°×9.25Hz) |
| Angular resolution*† | QVGA:0.375° VGA:0.188°(same in both horizontal and vertical direction) |
| Startup time* | 60sec |
| Interface | Ethernet (1000BASE-T) |
| Size | 120(W)×57.2(D)×63.5(H)mm |
| Weight | 650g |
| Light source | VCSEL Laser ( λ= 905nm ) |
| Ambient temperature | -30℃~+50℃, below 85%RH (without dew, frost) |
| Storage temperature | -30℃~+70℃, below 85%RH (without dew, frost) |
| Vibration resistance | 10~55Hz Double amplitude 1.5mmp-p each 2hours |
| 55~200Hz 98m/s2(10G) Sweep 2min each 1hour in X, Y and Z directions | |
| Shock resistance | 196m/s2 (20G) each 10 times in X, Y and Z directions |
| Protective structure | IP64 |
| Laser safety class | Class 1 (compliant with IEC-60825-1) |
*If not otherwise specified, the specifications are based on the following conditions.
・Hokuyo testing environment
・Ambient temperature : 25°C
・Target reflectivity : 10%
・Resolution : 320 × 240 (QVGA)
・On-axis (center of field of view)
※1 : Detection accuracy decreases when the angle increases, as the received light intensity is reduced.
※2 : Distance accuracy and repeatability are evaluated under the following conditions.
Distance Accuracy : Average of 25 locations, each based on the average of 100 measurements per pixel in 5×5 center area.
Repeatability : Average of 25 locations, each based on the standard deviation of 100 measurements per pixel in 5×5 center area.
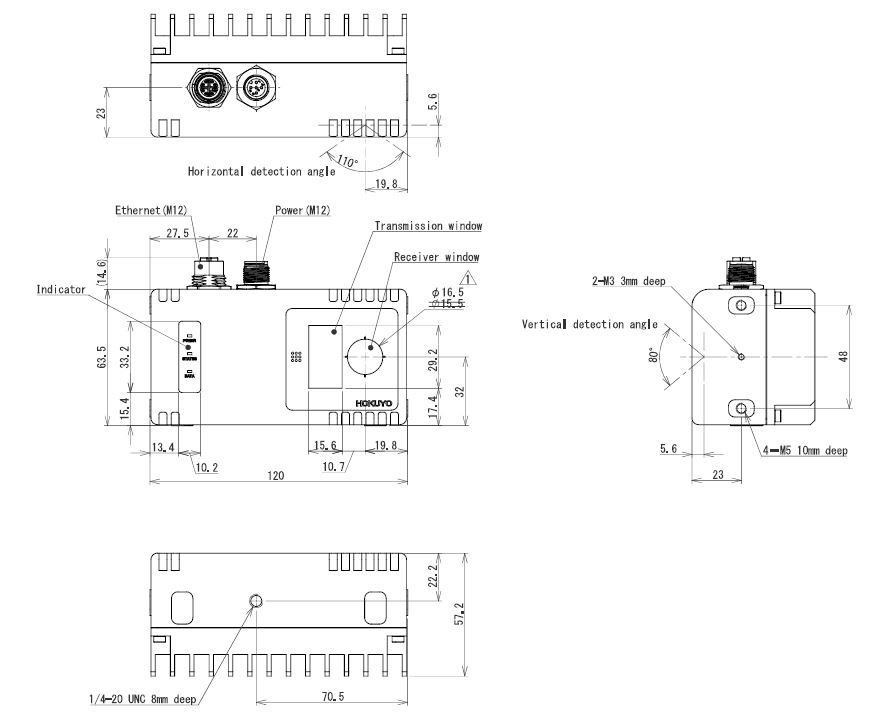
External dimension
I/O Circuit
Connector pin assignment
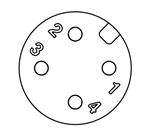
Model: Amphenol M12A-04PMMS-SF8001 (M12 male A code)
| Pin No. | Function |
| 1 | +VIN +24VDC |
| 2 | ー |
| 3 | -VIN 0VDC |
| 4 | ー |
Ethernet connector
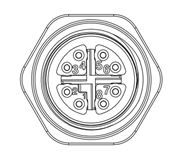
| Pin No. | Function |
| 1 | TX_D1+ |
| 2 | TX_D1- |
| 3 | RX_D2+ |
| 4 | RX_D2- |
| 5 | BI_D4+ |
| 6 | BI_D4- |
| 7 | BI_D3- |
| 8 | BI_D3+ |
Power cable with connector (Option)
Sensor side (M12 female A-code straight connector)/Power supply side Loose wires
| Pin No. | Funcition | Color |
| 1 | +VIN +24VDC | Brown |
| 2 | ー | White |
| 3 | -VIN 0VDC | Blue |
| 4 | ー | Black |
Ethernet connector (Option)
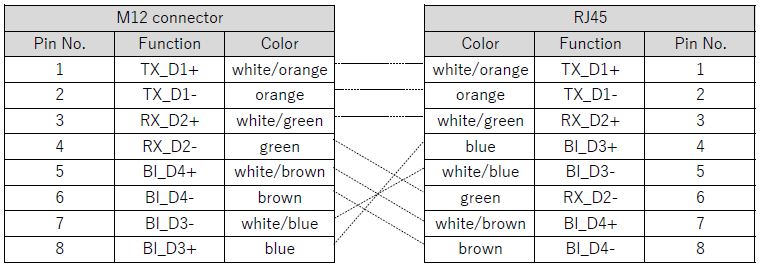
Sensor side (M12 male X-code straight connector)/Host side (RJ45)
Downloads
Before Download
If you have not registered as a member, please register as a member by clicking the "Registration".
If you are already a member, please agree to the following terms and click the "Agree".
License for Downloading Materials
When downloading the product specifications, drawings and various types of materials and software related to the Hokuyo's product line, please read the terms of use in advance and then utilize the same with your understanding and consent. In case of dissent, please understand that you cannot register to and be recognized in the download page. (And the Terms of Use may be revised without prior notice.)
Terms of Use
- Intellectual Property Rights
-
- Copyrights and the other rights to contents such as sentences, data and software published on this Website (hereinafter referred to as "Contents") are held by Hokuyo or its suppliers.
- The secondary application (copy, diversion, defacement, analysis, transmission, assignment, rental, licensing, and usage for the purpose of business activities or commercial gain) of the Contents on this Website posted by Hokuyo is strictly prohibited without our prior approval. Specific terms of use described for each download site or Contents shall apply in preference to the Terms of Use.
- Provision of the Contents on this Website by Hokuyo means neither a transfer of the patent rights, design rights, and/or the other intellectual property rights to inventions and designs in the Contents, nor a grant of any rights based on the intellectual property rights.
- Disclaimer
-
Hokuyo pays full attention to the information that appears on this Website, but does not take responsibility for the following items:
- The information that appears on this Website is always the latest version, and is updated or corrected timely and properly;
- The information that appears on this Website is accurate, useful and safe;
- Customer's damage incurred by the use of this Website, including changes or deletions of the information, discontinuation or suspension of the publication; and
- Any and all damage incurred by using this Website.
Download List
| Category | File name | File size | Date modified | Download |
|---|---|---|---|---|
|
|
Provisional_Specifications_YLM-10LX
|
---
|
2025-10-01
|
|
|
|
External Dimension_YLM-10LX
|
---
|
2025-07-28
|
|
|
|
Provisional_YLM_viewer_1.0.1(R194)_installer
|
---
|
2025-07-01
|
|
|
|
3DCAD_YLM-10LX
|
---
|
2025-08-27
|
|
|
|
Communication Protocol Specifications for Sensor Setting_YLM
|
---
|
2026-02-25
|
|
|
|
Communication Protocol Specifications for Data Acquisition_YLM
|
---
|
2026-02-25
|
Programming

Please refer to the sample program for the YLM series, as well as the instructions on how to use the YLM with ROS/ROS2.
Relation Products











- Scanning Rangefinder
- Photoelectric Switch
- Sensor for Iron & Steel Industry
- Optical Data Transmission Device
