Products List
-

PHV
Sensor for Iron & Steel IndustryCMDHigh performance design with using LED
This series are ideal for detection steel materials in harsh environments at steel plants and heavy industry. -

PRV
Sensor for Iron & Steel IndustryHMDFiber optic type HMD.
It operates by detecting infrared rays (heat rays) radiated from the heat material.
It is ideal for detecting steel materials at steel plants and heavy industry in harsh environments. Detectable hot metal temp is 360 to 1,200 degrees C -

PH-DX/PH-WX
Sensor for Iron & Steel IndustryCMDLED type CMD.
It uses a robust die-casting case and is ideal for detecting steel materials at steel plants and heavy industry. A lineup of water-cooled case type is also available. -
MBX-301CA
Sensor for Iron & Steel IndustryMicrowave-guide type DetectorMicrowave type not affected by vapor, disturbance light or smoke
-

MBX-211
Sensor for Iron & Steel IndustryClose Crane WarningDetecting accuracy is high because of geometrical setting system
-

MBF
Sensor for Iron & Steel IndustryClose Crane WarningStable operation under severe environment because of using microwave
-

LAV
Sensor for Iron & Steel IndustryCMDHigh performance design with using semiconductor laser.
This series are ideal for detection steel materials in harsh environments at steel plants and heavy industry. -

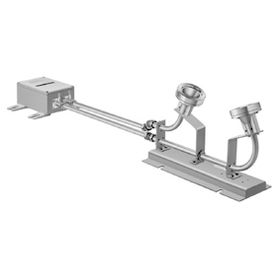
Sensor Head and Fiber Unit for CMD/HMD
Sensor for Iron & Steel IndustryFiber Unit & Sensor Head for CMD/HMDSemiconductor laser type detectors and other various products suitable for severe environments
-

PD-10M/8NM
Photoelectric SwitchOptical Distance MeasurementBy phase difference between the benchmark projected optical signal and the received optical signal from the reflector, the distance between 2 points will be calculated.
Featured points:
Analog output in proportion to distance
Two comparator outputs within any distance -
FG-31C/51C
Photoelectric SwitchU-ShapedCase: die casting
Width: 31mm and 51mm
Suitable for various positioning control applications with the sensor’s fast response and high repeatability -

FC-51C
Photoelectric SwitchU-ShapedWidth: 50mm
Suitable for various positioning control applications with the sensor’s fast response and high repeatability -

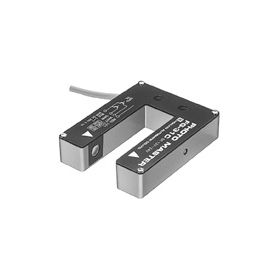
FBX-25
Photoelectric SwitchU-ShapedOne-beam and two-beam types available
Width: 25mm, repeatability: +/-0.1mm
Suitable for various positioning control applications with the sensor’s fast response and high repeatability -

DMS-G/H-E
Optical Data Transmission DeviceParallel typeOptical Data Transmission Device with high-frequency noise resistance.
This is Parallel I/O with 4-bit and 8-bit type. It communicates wirelessly (infrared ray) between mobile vehicles sides such as AGVs (Automated Guided Vehicles) and the station sides by using this. Compatible with SEMI E84 standard.Optical Data Transmission Device with high-frequency noise resistance.
This is Parallel I/O with 4-bit and 8-bit type. It communicates wirelessly (infrared ray) between mobile vehicles sides such as AGVs (Automated Guided Vehicles) and the station sides by using this. Compatible with SEMI E84 standard. -

DMS-G/H-V
Optical Data Transmission DeviceParallel typeThis is Parallel I/O with 4-bit and 8-bit type. It communicates wirelessly (infrared ray) between mobile vehicles sides such as AGVs (Automated Guided Vehicles) and the station sides by using this. Model numbers corresponded to SEMI E84 are lined up.
-
DMG
Optical Data Transmission DeviceParallel typeThis is Parallel I/O with 4-bit and 8-bit type.
It communicates wirelessly (infrared ray) between mobile vehicles sides such as AGVs (Automated Guided Vehicles) and the station sides by using this.
Model numbers corresponded to SEMI E84 are lined up.
This is provided a logging function and it is useful to solve some troubles such as interlocking.This is Parallel I/O with 4-bit and 8-bit type.
It communicates wirelessly (infrared ray) between mobile vehicles sides such as AGVs (Automated Guided Vehicles) and the station sides by using this.
Model numbers corresponded to SEMI E84 are lined up.
This is provided a logging function and it is useful to solve some troubles such as interlocking. -

DMJ-G/HB1
Optical Data Transmission DeviceParallel typeThis is Parallel I/O (8-bit) with RJ-11 modular cable type.
It communicates wirelessly (infrared ray) between mobile vehicles sides such as AGVs (Automated Guided Vehicles) and the station sides by using this.
This is provided with a logging function and corresponded to SEMI E84.
This composes of Head, Connector and RJ-11 cable, it is user friendly to make wiring.This is Parallel I/O (8-bit) with RJ-11 modular cable type.
It communicates wirelessly (infrared ray) between mobile vehicles sides such as AGVs (Automated Guided Vehicles) and the station sides by using this.
This is provided with a logging function and corresponded to SEMI E84.
This composes of Head, Connector and RJ-11 cable, it is user friendly to make wiring. -

DMH-GC/HC
Optical Data Transmission DeviceParallel typeMore compact and lighter compare with previous models.
With light emission adjuster, the transmission distance can be easily customized. -

DMH-GB/HB
Optical Data Transmission DeviceParallel typeThe transmission time is 7ms which is 5 times faster than the normal 8-bit DM series.
So it’s possible to transfer and receive more data within limited time. -

DMM
Optical Data Transmission DeviceOpen Network (Parallel)There are compatibilities between:
DMM-GB/HB and DMS-GB/HB-V
DMM-GC/HC (16 bit) and DMH-GC/HC
Therefore they can be used together as the communication partners.
With detachable connectors, maximum 64 units can be connected to a master unit. -

BWF-11/21/31/41
Optical Data Transmission DeviceSerial typeLong distance Optical Data Transmission Device with serial interfaces.
Sophisticated functions are available even with the compact size and light weight.
The long distance transmission is enabled by our own data signal processing technologies.
Transmission speed: up to 19.2kbps
Interface: RS-232C/422 and Current loop/RS-232C etc.Long distance Optical Data Transmission Device with serial interfaces.
Sophisticated functions are available even with the compact size and light weight.
The long distance transmission is enabled by our own data signal processing technologies.
Transmission speed: up to 19.2kbps
Interface: RS-232C/422 and Current loop/RS-232C etc. -

BWF-17/27
Optical Data Transmission DeviceOpen Network (Serial)Maximum 112 points, 16 words can be transmitted.
Maximum 42 units can be connected to a master unit. -

BWF-3E/4E-CE
Optical Data Transmission DeviceOpen Network (Serial)Optical Data Transmission Device / Open Network
-

CWF-01/02
Optical Data Transmission DeviceSerial typeAll necessary features are included within the body size 80x80x40mm.
Applications are for controlling starker cranes of automatic warehouse and other overhead cranes which require certain distance. -

CWF-11/12
Optical Data Transmission DeviceSerial typeTransmission distance is 80m that is the longer version of CWF-01/02.
Optical axis can be easily adjusted. -

EWF-0/1E-N
Optical Data Transmission DeviceOpen Network (Serial)100Mbps optical repeater which can directly connet to the Ethernet line.
Setting of MAC address or IP is not required and it can be used as LAN cables.Non-contact transmission is available for up to 100m between moving devices.
*This model integrates the conventional model. -

BRS
Optical Data Transmission DeviceOptical Remote ControllerCompare with the traditional model, this new series is much smaller and thinner.
Backlight in the screen makes it easy to see.
Lifetime is improved by suing the sheet switch in the key board. -

BRC-G
Optical Data Transmission DeviceOptical Remote Controller4-point and 12-point type are available
Meet the industrial needs with its high reliability -

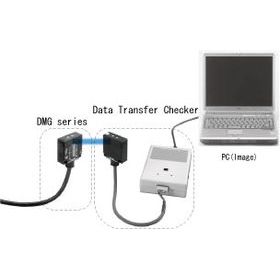
BNC
Optical Data Transmission DeviceParallel typeYou can confirm the operation quality before or after SEMI E84 communication using the device.
With 2 types of application software, you can read the following data in the form of timing chart through a computer:
a) Interlocks simulation before handling materials
b) Optical communication logging data in DMG sensor after handling materials, as a method of solving troublesYou can confirm the operation quality before or after SEMI E84 communication using the device.
With 2 types of application software, you can read the following data in the form of timing chart through a computer:
a) Interlocks simulation before handling materials
b) Optical communication logging data in DMG sensor after handling materials, as a method of solving troubles -

ISP-A1C
Optical Data Transmission DeviceSerial/Parallel ConverterConvert serial data to parallel format or the reverse
Transfer a large number of signals with a few wires
Wireless transmission can be sassily done with our Optical Data Transmission Devices.
Transmission speed is faster compare with the previous model. -

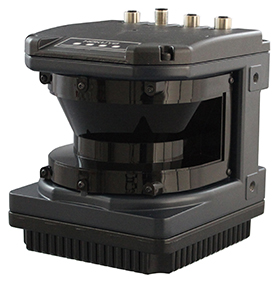
YVT-35LX-F0/FK
 Scanning RangefinderDistance Data Output
Scanning RangefinderDistance Data Output3D LRF
3D Scanning Range Finder.
The distance is measured by steering the laser beam vertically and horizontally.
In 1 frame, a point cloud with 2590 points is generated.
It is possible to increase the point cloud density using the interlacing mode.
This scanner is equipped with an acceleration sensor and a PPS input signal.3D LRF
3D Scanning Range Finder.
The distance is measured by steering the laser beam vertically and horizontally.
In 1 frame, a point cloud with 2590 points is generated.
It is possible to increase the point cloud density using the interlacing mode.
This scanner is equipped with an acceleration sensor and a PPS input signal. -

PBS-03JN
 Scanning RangefinderArea Configuration
Scanning RangefinderArea ConfigurationInfra-red LED light source, distance measurement type obstacle detector.
Fine settings available for each pattern,
greatly improved than normal reflective photo sensors.
Scanning angle: 180° -

UTM-30LN
Scanning RangefinderArea Configuration30m and 270° scanning range.
Working under 100,000lx with IP64 protection structure.
Suitable for security purpose as a monitor in outdoor environment.
25msec scanning time, also possible for sticking-out detection. -

UTM-30LX
Scanning RangefinderDistance Data Output30m and 270° scanning range.
Working under 100,000lx with IP64 protection structure.
Possible for outdoor applications such as service robots.
Suitable for robots with higher moving speed because of 25msec scanning time. -

UTM-30LX-EW
Scanning RangefinderDistance Data OutputEthernet interface type of Top-URG.
Protection structure is improved to IP67,
and it is more suitable for outdoor use even in the environment with 100,000lx. -

UAM-05LECA-T301
Scanning RangefinderSafety Laser ScannerNew EtherCAT type added to the UAM series
A safety laser scanner with 5 meter protection zone and 270° scanning angle, allowing flexible area configuration. It also allows easy management of multiple sensors over a single network.
Ideal for managing multiple robots together and sharing AGV speed information across the network.
Certified safety device compliant with international safety standards.New EtherCAT type added to the UAM series
A safety laser scanner with 5 meter protection zone and 270° scanning angle, allowing flexible area configuration. It also allows easy management of multiple sensors over a single network.
Ideal for managing multiple robots together and sharing AGV speed information across the network.
Certified safety device compliant with international safety standards. -

UXM-30LX-EW
Scanning RangefinderDistance Data OutputStable detection even targeting black objects.
Multi-echo functionality and IP67 available. -

UXM-30LN-PW
Scanning RangefinderArea ConfigurationStable detection even targeting black objects.
Multi-echo functionality and IP67 protection,
and make it possible to operate under harsh environment such as rain, snow and fog. -

UGM-50LXP/ UGM-50LXN
Scanning RangefinderDistance Data OutputMax. distance 120m for outdoor.
Maximum detection range is 120 meters and 190 degrees.
The metal housing protects internal system up to 50G(single).
Its protective structure is IP67. -
UGM-50LAP/ UGM-50LAN
Scanning RangefinderArea ConfigurationMax. distance 120m for outdoor.
Area Output Model
Maximum detection range is 120 meters and 190 degrees.
The metal housing protects internal system up to 50G(single).
Its protective structure is IP67. -

URM-40LC-EWT
 Scanning RangefinderArea Configuration /Distance Data Output
Scanning RangefinderArea Configuration /Distance Data OutputNEW MODEL
New 2D Scanning Range Finder for outdoor
Compact model and the 40m range.
Multi-echo functionality and IP67 protection with it. -

UXM-30LXH-EHA
Scanning RangefinderDistance Data OutputUpgraded with finer resolution.
Multi-echo functionality and IP67 protection
for harsh environments such as rain, snow and fog. -

UXM-30LAH-EHA
Scanning RangefinderArea Configuration /Distance Data OutputUpgraded with finer resolution.
Multi-echo functionality and IP67 protection
for harsh environments such as rain, snow and fog. -

UXM-30LXH-EWA
Scanning RangefinderDistance Data OutputUpgraded with finer resolution.
Multi-echo functionality and IP67 protection
for harsh environments such as rain, snow and fog. -

UXM-30LAH-EWA
Scanning RangefinderArea Configuration /Distance Data OutputUpgraded with finer resolution.
Multi-echo functionality and IP67 protection
for harsh environments such as rain, snow and fog.
More flexible field setting is also available. -

UST-30LX
Scanning RangefinderDistance Data OutputOutdoor model with Small Size
The smallest and lightest of its kind.
The lightness at only 130g make it easy to install on even smaller robots or Unmanned Aerial Vehicles. -

UST-30LC/LCN
Scanning RangefinderArea Configuration /Distance Data OutputScanning Rangefinder / Area configuration type
-

UST-15LX
Scanning RangefinderDistance Data OutputOutdoor model with Small Size
The smallest and lightest of its kind.
The lightness at only 130g make it easy to install on even smaller robots or Unmanned Aerial Vehicles. -

UST-10/20LX
Scanning RangefinderDistance Data OutputThe smallest and lightest of its kind.
The lightness at only 130g make it easy to install on
even smaller robots or Unmanned Aerial Vehicles. -

UST-10/20LN
Scanning RangefinderArea Configuration10m and 20m Scanning Range and Compact!
Upgraded with wider detection range and faster response time.
More flexible field setting is available,
and even more suitable for obstacle detection of AGVs or load shifting detection. -

UST-05LA/05LAP
Scanning RangefinderArea Configuration /Distance Data OutputUpgraded with wider detection range and faster response time.
More flexible field setting is available,
and even more suitable for obstacle detection of AGVs or load shifting detection. -

UST-05LX
Scanning RangefinderDistance Data OutputNew model : Distance output type of the UST-05 series.
Upgraded with wider detection range and faster response time. -

UST-05LN / UST-05LNP
Scanning RangefinderArea ConfigurationVery compact!
NPN and PNP types are available.
Upgraded with wider detection range and faster response time.
More flexible field setting is available,
and even more suitable for obstacle detection of AGVs or load shifting detection. -

KAD-300
Sensor for Iron & Steel IndustryClose Crane WarningDistance measurement sensor, working with its reflector
By phase difference between the benchmark projected optical signal and the received optical signal from the reflector, the distance between 2 points will be calculated.
Output can be set at any distance of its detectable range. KAD-300 is the longer distance version of KAD-200Distance measurement sensor, working with its reflector
By phase difference between the benchmark projected optical signal and the received optical signal from the reflector, the distance between 2 points will be calculated.
Output can be set at any distance of its detectable range. KAD-300 is the longer distance version of KAD-200 -

UAM-05LP-T301/T301C
Scanning RangefinderSafety Laser ScannerSafety Sensor
A compact design for installation on AGVs, AGCs as well as in vertical guarding applications.
Conformity Standards
IEC61496-1/3: Type3
IEC61508: SIL2
ISO13849-1: PL d Category3 -

KAD-200
Sensor for Iron & Steel IndustryClose Crane WarningDistance measurement sensor, working with its reflector
By phase difference between the benchmark projected optical signal and the received optical signal from the reflector, the distance between 2 points will be calculated.
Output can be set at any distance of its detectable range.Distance measurement sensor, working with its reflector
By phase difference between the benchmark projected optical signal and the received optical signal from the reflector, the distance between 2 points will be calculated.
Output can be set at any distance of its detectable range. -

UAM-05LPA-T301/T301C
Scanning RangefinderSafety Laser ScannerSafety laser scanner with 5m and 270°protection range.
It is compact, highly functional, and easy to use, and can improve the efficiency and operation rate of factories and logistics by providing safety measures for AGVs, robots, machinery, etc.
It can replace protective fences, light curtains and mat switches.
Safety standard certified.
*Improved environmental resistance compared to conventional UAM.Safety laser scanner with 5m and 270°protection range.
It is compact, highly functional, and easy to use, and can improve the efficiency and operation rate of factories and logistics by providing safety measures for AGVs, robots, machinery, etc.
It can replace protective fences, light curtains and mat switches.
Safety standard certified.
*Improved environmental resistance compared to conventional UAM. -

PGL-050W3/180W3
Photoelectric SwitchLaser Distance MeasurementNEW 180m Distance (maximum)
Laser Distance Measurement
Long distance type laser sensor
Two models are available -

AreaDesigner for Tablet
Scanning RangefinderArea ConfigurationAndroid/iOS app of AreaDesigner for tablet
Measurement monitoring and confirmation of area settings is possible from Android/iOS tablet device.
-

UCT-10LCM
Scanning RangefinderArea ConfigurationOnly 20 mm thick, this ultra-slim 3D LiDAR offers up to 10 m detection with a wide 100° (H) × 6° (V) scan,
It is ideal for forklift pallet hole detection, AGV/AMR step detection, and safety applications such as intrusion and door pinch detection. -

UAM Monitor
Scanning RangefinderArea ConfigurationUAM Monitor
Smartphone app for the UAM series (Android/iOS).
It enables monitoring of sensor measurement data and checking output status from Android/iOS devices. -

YHT-10LA
Scanning RangefinderArea ConfigurationThe first area-setting type 3D LiDAR in our lineup.
Up to 10 m detection range with scan angle of 45° (H) × +40°/−45° (V).
Scanning speed is less than half that of conventional models, enabling real-time measurement.
Ideal for safety applications such as AGVs/AMRs, forklifts, and robotic systems.The first area-setting type 3D LiDAR in our lineup.
Up to 10 m detection range with scan angle of 45° (H) × +40°/−45° (V).
Scanning speed is less than half that of conventional models, enabling real-time measurement.
Ideal for safety applications such as AGVs/AMRs, forklifts, and robotic systems.
- Scanning Rangefinder
- Photoelectric Switch
- Sensor for Iron & Steel Industry
- Optical Data Transmission Device
